PCL Robotics and Automation Magazine Registration Tutorial

PublicationDirk Holz, Alexandru-Eugen Ichim, Federico Tombari, Radu B. Rusu, and Sven BehnkeA modular framework for aligning 3D point clouds - Registration with the Point Cloud LibraryAccepted for IEEE Robotics and Automation Magazine, to appear in 2015.Click on the image to download the full version of the paper: |
|

Datasets
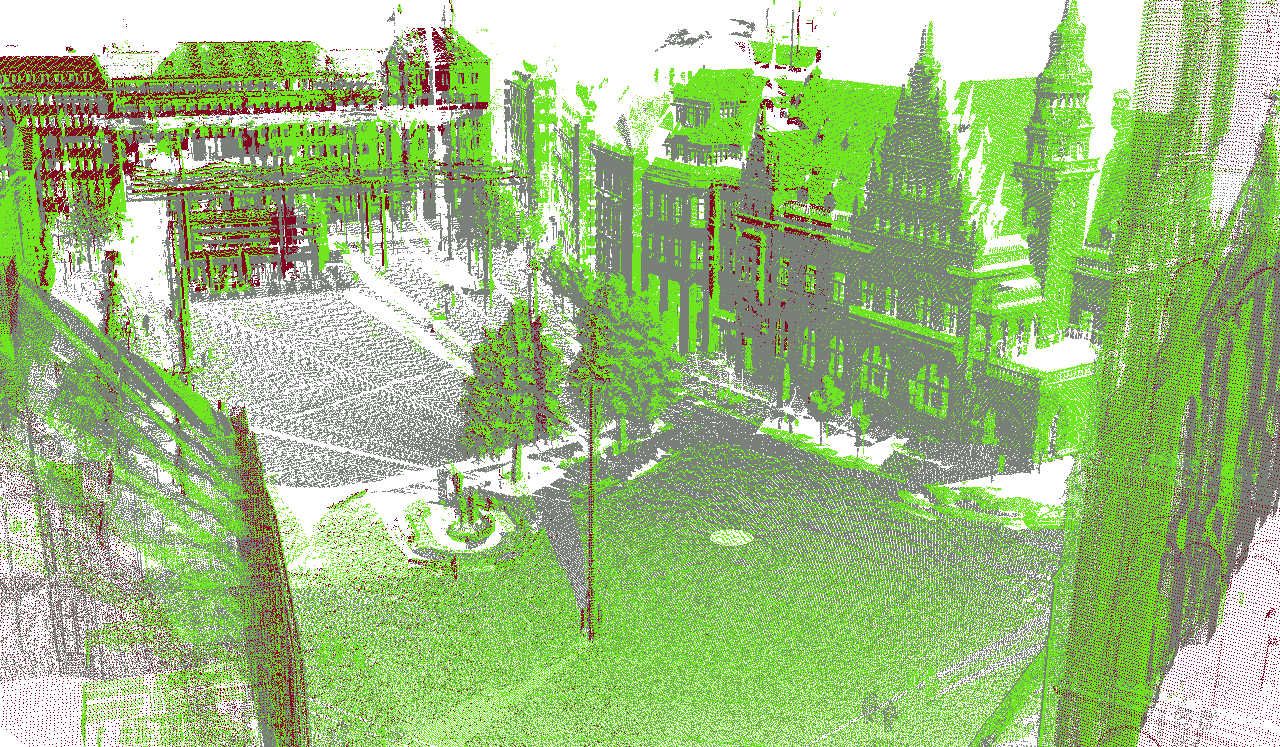
Large-scale 3D Laser Scans
|
The dataset used for the examples in the paper can be downloaded here: Subsampled Bremen dataset For more high resolution laser scan datasets, we recommend the dataset collection of the University of Osnabrueck: |
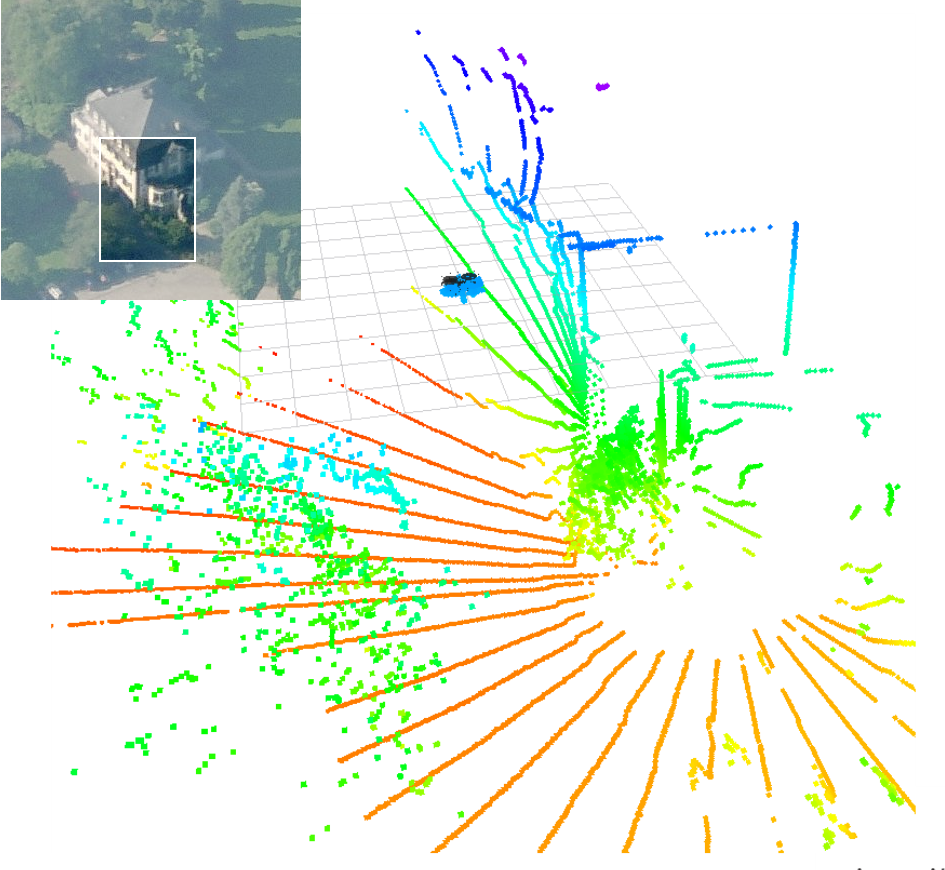
Sparse Low-resolution 3D Laser Scans
|
The dataset used for the examples in the paper can be downloaded here: Selected MAV dataset For more 3D laser scanning data using MAVs, visit the webpage of the University of Bonn: 3D Laser-based Mapping with Micro Aerial Vehicles |
Sequences of RGB-D Images
|
The dataset used for the examples in the paper can be downloaded here: Sitting table dataset |
|
|
|
Toy cars dataset |


Other datasets
|
For more datasets, please visit the pcl dataset webpage, where some of the most popular 3D datasets are indexed: |

Source Code
We provide source code set up to experiment with the methods described in the paper. All the projects require PCL 1.7, and are build using CMake. Please check the Point Cloud Library Tutorials on how to set up your system and become familiar with the basic building concepts: http://pointclouds.org/documentation/tutorials/General Tutorial and RGB-D Registration
Large-scale 3D Laser Scans
Sparse Low-resolution 3D Laser Scans (requires the trunk version of PCL as of 24.06.2015)
Authors:
For further questions or suggestions, please do not hesitate to contact the authors via e-mail.- Dirk Holz, University of Bonn, Germany
- Alexandru E. Ichim, Ecole Polytechnique Federale de Lausanne, Switzerland
- Federico Tombari, University of Bologna, Italy
- Sven Behnke, University of Bonn, Bonn, Germany
- Radu B. Rusu, Open Perception, Inc., CA, USA